小型傾轉旋翼機的無刷直流電機驅動器設計

下面簡單介紹一下擬合方法,為簡便起見,選取三個待擬合的點。根據這三個點的特點,不妨分別稱它們為起始點、轉折點和切換點,其中從起始點到轉折點之間要求快速加速,保證起動速度;在轉折點之后曲線應平緩,減小波動以便于平穩切換到自同步運行,切換點的選取應以能產生清晰的反電勢信號為準。
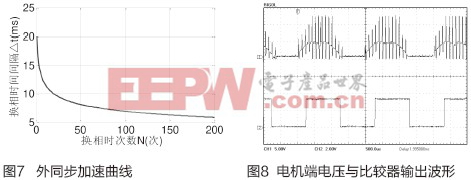
本文引用地址:http://www.104case.com/article/145573.htm 根據調試實驗,固定PWM占空比為15%,選取起始點、轉折點和切換點坐標分別為(1,20)、(100,7.3)及(200,6),括號中第一個元為換相次數N,單位為次;第二個元為換相時間間隔 ,單位為毫秒。擬合的冪函數曲線表達式如式(2)所示。
![]()
電容滯后換相的補償
由于反電勢過零檢測電路中存在濾波電容,這會導致自同步運行階段檢測到的位置信號滯后于實際位置信號。為確保電機準確換相,需計算出滯后時間并對其進行補償。由反電勢過零檢測電路可得:
![]() (3)
(3)
進而計算出滯后的相角為:
![]()
式(3)和式(4)中f為反電勢信號頻率。利用定時器實時地測量相鄰兩個反電勢過零點的時間間隔,便可計算出f,進而求出滯后角 進行相位補償。
實驗調試與分析
實驗電機采用XXD2212型外轉子無刷直流電機,其額定電壓為12V,最高空載轉速為12000 r/min。螺旋槳采用GF1045高速槳。經反復實驗,電機可以成功帶載起動。圖8是調節PWM占空比為30%時,用RIGOL DS5202型示波器測量的實驗波形,其中通道1為A相端電壓波形,通道2為A相對應的比較器輸出波形,可見電機運轉平穩,調速性能良好。從圖中也可以看出,比較器提供的轉子位置信號略滯后于實際信號,驗證了相位補償的必要性。
結束語
本文采用反電勢法設計了小型傾轉旋翼機無刷直流電機驅動系統,完成了硬件電路以及軟件的設計調試。通過實驗對電機起動加速曲線進行了擬合,并補償了濾波電容引起的相位滯后。調試結果表明,在負載為GF1045螺旋槳條件下,該驅動器能驅動XXD2212型無刷直流電機可靠起動,并能實現平穩調速,滿足旋翼機的設計要求。
參考文獻:
[1]Martin D M, Demo J G, Daniel C D. The history of the XV 215 tilt rotor research aircraft: from concept to flight [R]. NASA SP2200024517, 2000: 12299
[2]徐昊.傾轉旋翼機姿態控制問題研究[D].哈爾濱工業大學,2011
[3]SU G J, MCKEEVER J W. Low-cost Sensorless Control of Brushless DC Motors with Improved Speed Range[J].IEEE Trans. on Power Electronics, 2004, 19,(2):296-302
[4]吳紅星,葉宇驕,倪天,等.無刷直流電機轉子位置檢測技術綜述[J].微電機,2011,44,(8):75-76
[5]孟磊,蔣宏,羅俊,等.四旋翼飛行器無刷直流電機調速系統的設計[J].電子設計工程,2011,19,(12):95-96
[6]廖承喜,朱志杰,翁微.無刷直流電機三段式自起動關鍵技術研究[J].電力電子技術,2008,42,(5):61-62












評論