將HIL應用于無人機制導、導航與控制

板載處理單元
本文引用地址:http://www.104case.com/article/141528.htm我們在實時操作系統(tǒng)(QNX或VxWorks)中運行一個PC/104單元,操作系統(tǒng)中包含了算法和控制策略,用于測試自動代碼生成工具和集成架構創(chuàng)建的代碼的完成。我們在現(xiàn)場實驗的真實無人機中也使用了相同的單元。
可視化
我們可以使用Simulink External Mode軟件對無人機進行調(diào)試。通過這個軟件,我們可以監(jiān)測用戶需要實時知曉的信號值。此外我們可以改變嵌入式處理單元中所執(zhí)行算法的參數(shù)。在操作中所使用的界面,與控制工程師在仿真設計算法時所使用的界面完全一樣。由此,整個測試環(huán)境完全透明,而且能以同現(xiàn)場測試一樣的方式進行HIL測試,從而大幅減少開發(fā)時間。
結果
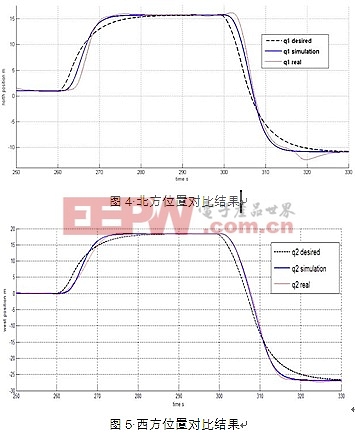
對比飛行遙測和使用同樣的GNC算法的HIL仿真,可以表明HIL的精準性和與真實測試結果的相似性。
我們在一架改裝過的無線電控制的直升飛機上集成了幾個傳感器(加速度計,回轉儀,磁力計,GPS和一個高度計)和一個處理單元(見圖3),將其轉變成一架無人機,進行飛行測試。

圖3:實驗中使用的基于CB5000 RC直升機改裝而成的無人機圖3:實驗中使用的基于CB5000 RC直升機改裝而成的無人機
無人機在沒有過沖或任何一個永久誤差的情況下,達到了水平面要求的參考值(見圖4和圖5)。HIL仿真和真實的飛行測試結果極其一致。
結論
HIL環(huán)境非常適用于測試包含真實硬件的整個系統(tǒng)。使用NI PXI,我們在實時狀態(tài)下以低延時仿真了一個復雜的無人機模型,并完美模擬了航空設備界面。
這個環(huán)境能檢測出軟件仿真中無法顯示的錯誤,從而避免現(xiàn)場實驗意外的發(fā)生。因為控制工程師在設計,開發(fā)和驗證過程中也會使用相同的可視化和調(diào)試工具,由此可以快速重復循環(huán),減少開發(fā)時間。











評論