設備的動力來源--鋰離子充電器

電池參數測量電路:反饋信號需要用ADC測量,目前大多數微控制器均可提供ADC外設。在圖3和圖4中,我們看到了如何獲取電池電壓和電流反饋。然而,這些差分信號需要使用差分ADC進行測量,而通常微控制器中采用的是單端ADC。圖4和圖5所示的電路通過讓微控制器接地和電源接地不同,可方便地加以修改,從而為電壓、電流和溫度所有3個參數生成單端信號。
本文引用地址:http://www.104case.com/article/140706.htm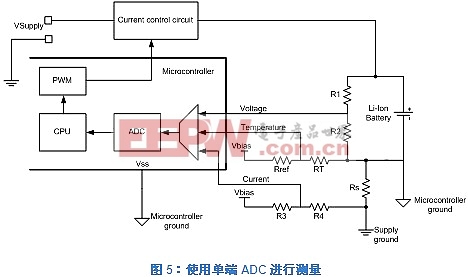
將電池負極作為微控制器接地,這就讓電壓、溫度和電流反饋到微控制器接地,并能進行單端ADC測量。對于電流反饋而言,需引入正偏移電壓,而反饋電壓在電池充電時將為負。如圖5所示,電阻R3和R4提供了所需的偏移電壓。
充電算法:此為閉環。CPU讀取ADC上的電池電壓、充電電流和溫度讀數,并根據充電曲線控制PWM占空比。CPU監控ADC結果和控制PWM的速度取決于環路響應時間和CPU帶寬消耗之間如何平衡。
ADC參數和PWM分辨率:ADC分辨率和精確度以及PWM分辨率是在設計電池充電器時應考慮到的重要參數。ADC分辨率定義了輸入電壓測量的精度(這里指反饋電壓)。PWM分辨率則定義了改變輸出信號占空比的精度,這進而又決定了電流控制電路的輸出電壓。鋰離子電池充電時,需要準確、高精度地控制電池電壓。當電池電壓接近充滿狀態時,這一點就顯得尤為重要。可控性取決于ADC分辨率、測量的準確度以及占空比變化的粒度。
圖5給出了采用賽普拉斯CY8C24x23 PSoC器件實施的充電器架構示例。微控制器與通用數字和模擬模塊配合使用,可配置為特定的電路功能。比如,連續時間模擬模塊可用來實施可編程增益放大器和比較器。開關電容器模擬模塊則有多種不同用途,包括濾波器、數模轉化器(DAC)和模數轉換器(ADC)等。數字基礎模塊可用來實施PWM、計數器、定時器和緩沖器,而數字通信模塊則可用來實施SPI、UART、IrDA RX和TX等通信接口。此外,該器件還可提供I2C模塊,既可作為主設備也可作為從設備。
圖6所示為單節電池充電器應用的器件資源消耗情況。我們看到還有足夠的數字和模擬模塊可用來實現其它有用的功能。這就為系統提供了更多的集成選項,從而有助于縮減系統成本和尺寸。







評論