用LabVIEW和CompactRIO開發腿輪移動機器人
作者:Chun Lin,Chiang Chen,Ke Jung Huang,Yu Shen,Hsin Li
時間:2012-01-06
來源:電子產品世界
收藏
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
在一般情況下,機器人屬于高自由度的復雜系統。機器人的成功發展需要花費時間和精力來妥善整合各種機械、電氣和計算機系統。來自國立臺灣大學BioRoLa團隊,主要由擁有機械工程背景的學生組成,他們需要一個可靠、模塊化、易于使用及良好集成的平臺。
本文引用地址:http://www.104case.com/article/127827.htm經過廣泛的研究,我們發現NI產品能為我們的應用程序提供最佳解決方案,原因如下:LabVIEW為非編程背景的學生提供了直觀的圖形化流程圖表示方法,可以讓他們輕松建立過程圖并作為解決方案,然后再將過程圖轉化為軟件。能在Windows,RTOS和基于FPGA的目標上使用相同的圖形化開發環境也極其有幫助。由于開發控制器軟件時我們不必花時間學習底層的編程語法,因而能夠花更多的時間專注于我們設計的機械部分。
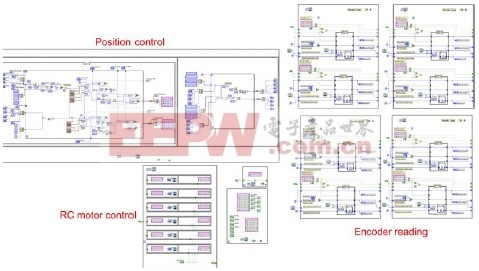
圖3. Quattroped 控制FPGA程序框圖
“對于移動機器人的開發來說,其大小,重量及性能都非常重要,因此堅固的模塊化CompactRIO 系統非常適合用于開發。LabVIEW和NI硬件之間定義良好的兼容性顯著地減少了開發者執行系統集成的時間和精力。”
未來計劃
憑借NI LabVIEW圖形化系統設計和NI CompactRIO,一支機械工程學生團隊設計出了一個擁有優雅軟件構造的復雜機電一體化系統,對于今后的進一步開發擴展也很方便。在硬件方面,我們正在將各種傳感器融合到當前的機電化系統中,以提高機器人的感應能力。在動作方面,我們正在完善和開發具有閉環控制功能的腿部行為,以提高機器人在各種具有挑戰性的地形上的移動能力,并開發其腿部動態步態。











評論