使用LabVIEW 等硬件對(duì)歐超大望遠(yuǎn)鏡的主反射鏡位置調(diào)整執(zhí)行器進(jìn)行控制
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
望遠(yuǎn)鏡模擬器
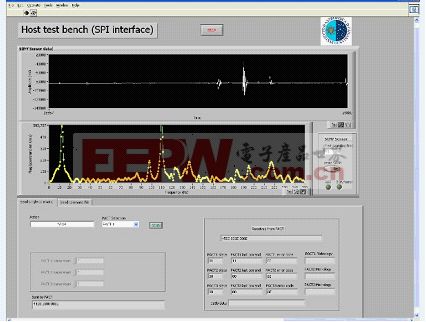
本文引用地址:http://www.104case.com/article/120350.htm為根據(jù)要求對(duì)位置執(zhí)行器進(jìn)行測(cè)試,我們開(kāi)發(fā)了另外一個(gè)軟件,用來(lái)模擬望遠(yuǎn)鏡計(jì)算機(jī)(通過(guò)SPI接口與位置執(zhí)行器通信)。這一計(jì)算機(jī)扮演著SPI主控器的角色,而執(zhí)行器則位于SPI從屬端。此模擬程序以1 kHz的速率發(fā)送數(shù)百萬(wàn)個(gè)的位置命令,并以1KHz的速率通過(guò)SPI總線讀取從屬端的反應(yīng)。此外,它還以5kHz的速率從一個(gè)安裝于機(jī)械測(cè)試臺(tái)上的附加外部位置傳感器讀取數(shù)據(jù),用于對(duì)位置執(zhí)行器的內(nèi)部傳感器進(jìn)行交叉檢查。這三個(gè)循環(huán)都需要以優(yōu)于200us的精度進(jìn)行同步,對(duì)數(shù)據(jù)進(jìn)行二進(jìn)制格式的存儲(chǔ)以用于離線分析。在長(zhǎng)為一小時(shí)的測(cè)試中,所存儲(chǔ)的文件將大于100 MB。圖2中的圖形用戶界面顯示了命令管理、以及附加外部位置傳感器數(shù)據(jù)的時(shí)域和頻域同步顯示。
我們所采用的解決方案使用一個(gè)帶有數(shù)字I/O的NI PCI -7811R FPGA卡,安裝在基于Windows XP的電腦上(如圖2所示)。
兼具實(shí)時(shí)性和靈活性
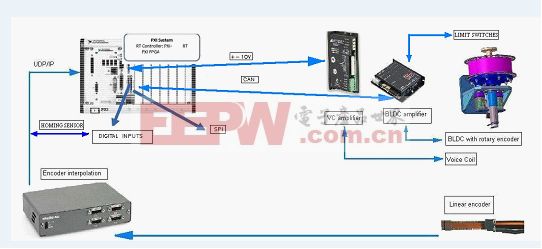
執(zhí)行器的電子控制裝置和軟件包含多種接口(如圖3所示),而且其中大部分接口都可以在開(kāi)發(fā)的初始階段進(jìn)行更改,包括:
帶有4MHz時(shí)鐘的SPI接口,能夠每ms接受一個(gè)外部命令
CAN總線接口,對(duì)粗調(diào)電機(jī)進(jìn)行控制,并使用CANopen作為應(yīng)用層協(xié)議,提供諸如行程限位和硬件報(bào)警等信息
模擬輸出接口,控制微調(diào)音圈電機(jī)
模擬輸入接口,監(jiān)視微調(diào)音圈電機(jī)的當(dāng)前狀態(tài)
基于以太網(wǎng)的UDP/IP協(xié)議接口,讀取外部位置傳感器的電子裝置中的數(shù)據(jù)
基于以太網(wǎng)的TCP/IP協(xié)議接口,下載并調(diào)試輔助的離線數(shù)據(jù)
數(shù)字輸入接口,用于讀取原點(diǎn)位置傳感器的數(shù)據(jù)
使用這些接口需要極大的靈活性。
如下功能則需要實(shí)時(shí)特性:
使用SPI從屬設(shè)備以80MHz的速率讀取數(shù)字輸入,在幾微秒的時(shí)間內(nèi)對(duì)一個(gè)新的外部命令作出響應(yīng)
執(zhí)行快速微調(diào)伺服控制,包括基于若干個(gè)2kHz到10kHz濾波器的PID(比例微分積分 - proportional integral derivative)控制,并且在開(kāi)發(fā)的最后階段可調(diào)
同步并存儲(chǔ)二進(jìn)制數(shù)據(jù)文件,用于SPI外部命令(1kHz)、音圈電機(jī)當(dāng)前模擬輸入(2kHz)、基于以太網(wǎng)的位置傳感器數(shù)據(jù)采集(2–10 kHz)和伺服控制器內(nèi)部變量(2–10 kHz)等數(shù)據(jù)的離線分析
使用商業(yè)現(xiàn)成可用的(commercial off-the-shelf,COTS)的平臺(tái)滿足這些要求,需要在靈活性和實(shí)時(shí)性之間作出折衷。然而,通過(guò)使用NI硬件,并通過(guò)LabVIEW Real-Time 和 LabVIEW FPGA模塊進(jìn)行編程,我們所獲得的實(shí)時(shí)特性超出了上述要求,而且各種接口均可調(diào)整,無(wú)需犧牲靈活性(圖3)。
結(jié)論
NI PXI平臺(tái)幫助我們?cè)诒3窒到y(tǒng)靈活性和實(shí)時(shí)性的同時(shí)顯著減少了開(kāi)發(fā)時(shí)間,而且能夠滿足電子裝置/軟件方面的設(shè)計(jì)要求。使用LabVIEW,可以在同一個(gè)軟件環(huán)境中對(duì)實(shí)時(shí)控制器和FPGA模塊進(jìn)行編程,幫助我們快速集成系統(tǒng),并確保系統(tǒng)獨(dú)立、可靠。此外。此外,NI工程師為我們提供了快速且有效的幫助,讓我們更快完成開(kāi)發(fā)。











評(píng)論