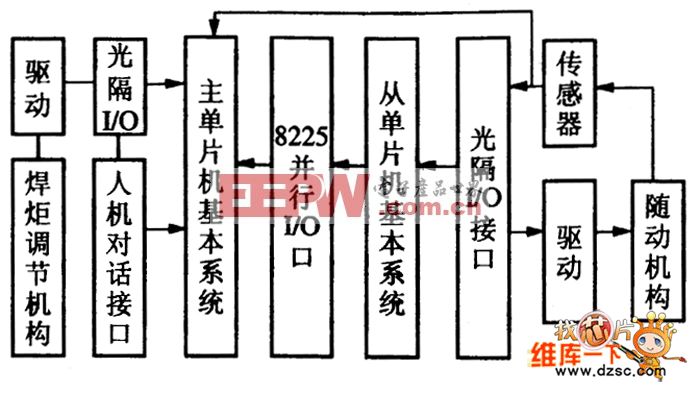
激光制導自動跟蹤焊接系統
—— 確保焊接施工的精確、高效和安全

采用大津方法處理圖像
本文引用地址:http://www.104case.com/article/113802.htm采用大津閾值法來處理所采集的圖像,以自動計算出在變化不定的照明條件下的最優閾值。利用大津方法,我們盡一切可能找到能最大限度地降低類內方差值(即,兩個類的方差的加權總和)的閾值:
權數ωi是被閾值t分隔開的兩個類的概率,2iσ是這兩個類的方差。
大津法表明,最大限度地降低類內方差值,等同于最大限度地提高類間方差值:
其中,ωi是類概率,μi是類平均數,相應地,這個值可以迭代更新。這種方法產生了一個簡單而又有效的算法:
1. 計算各個亮度條件下的直方圖和概率。
2. 設置初始ωi(0)和μi(0)。
3. 逐一計算所有可能的閾值t = 1 ? 最高亮度:更新ωi和μi;計算 。
4. 對應于最大 的理想閾值。
采用上述算法,處理所保存的圖像。經處理的圖像將保存到另一個10kb陣列中。確定最優閾值后,計算出中線(單像素寬線)。下一步是從中線中找到結合點。由此得到的坐標值將被輸出至先入先出堆棧。處理每幀圖像的平均用時約為65ms。
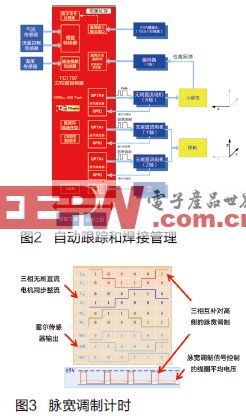
先入先出緩沖區
利用先入先出循環緩沖區來保存圖像處理模塊計算得到的坐標值。然后,伺服電機模塊將利用這些坐標值來將焊槍移動至相應的位置。攝像頭的初始坐標值是0,而焊槍的初始坐標值則是CIRCULAR_BUF_SIZE-1。根據攝像頭與焊槍之間的步數,在匯編時決定先入先出緩沖區的大小。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理 脈寬調制相關文章:脈寬調制原理 攝像頭相關文章:攝像頭原理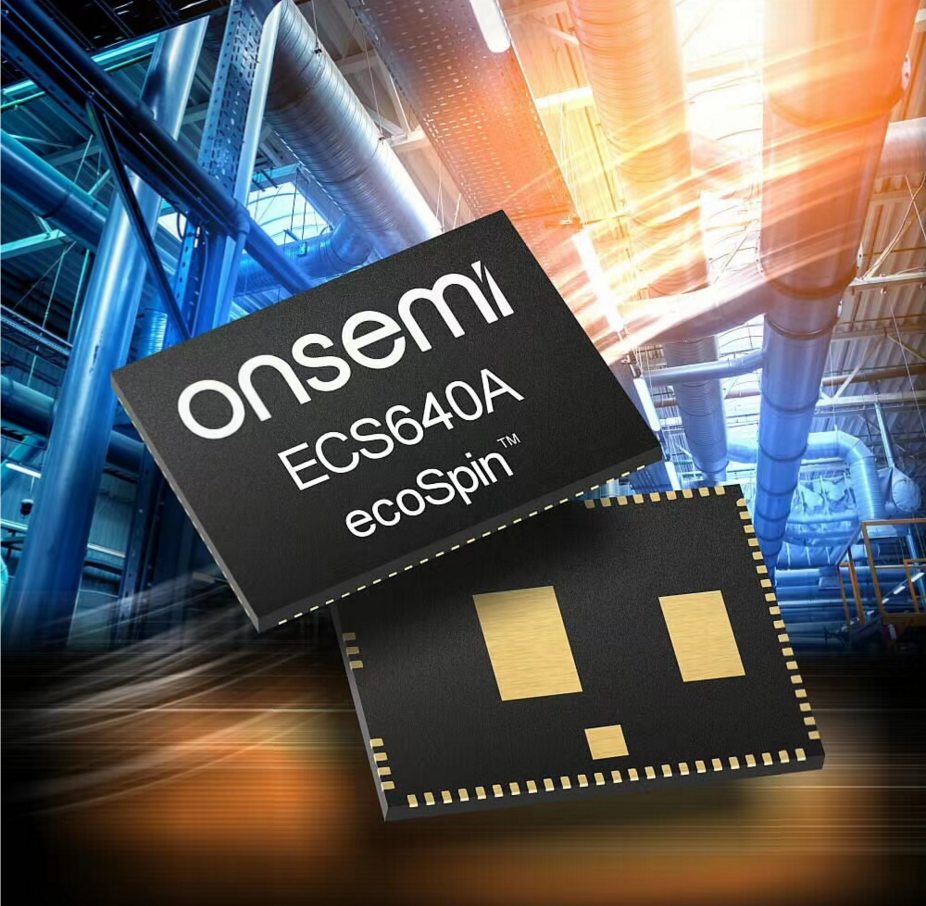





評論