基于伺服電機(jī)和運(yùn)動控制器的目標(biāo)仿真實時性控制研究
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
仿真結(jié)果分析
本文引用地址:http://www.104case.com/article/110150.htm圖6~11為半實物仿真試驗與數(shù)學(xué)仿真試驗激光制導(dǎo)炸彈空間三維坐標(biāo)變化曲線,可見兩種仿真模式下試驗曲線吻合良好。由于在整個彈道曲線中差別表現(xiàn)不明顯,因此給出了各坐標(biāo)相應(yīng)的彈道末端局部顯示曲線。
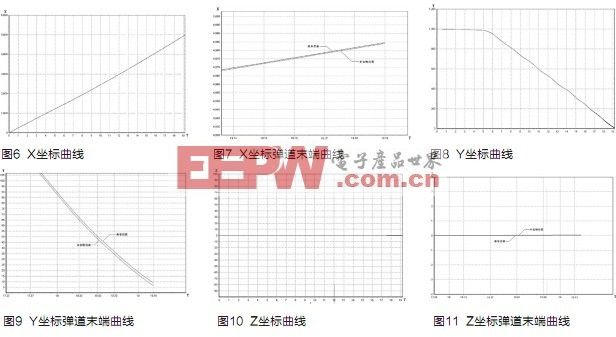
試驗結(jié)果表明,數(shù)學(xué)仿真的仿真解算穩(wěn)定,結(jié)果精度良好;同時,在相同投彈條件下,半實物仿真與數(shù)學(xué)仿真試驗過程相關(guān)性比較好,仿真精度非常高,由此反映出目標(biāo)仿真系統(tǒng)帶入全系統(tǒng)的誤差極小(目標(biāo)系統(tǒng)誤差占全系統(tǒng)誤差的90%),所設(shè)計的控制系統(tǒng)實現(xiàn)了光斑大小和能量的實時控制。
參考文獻(xiàn):
[1]王仕成,張金生. 激光尋的制導(dǎo)武器目標(biāo)仿真系統(tǒng)研制報告[R]. 第二炮兵工程學(xué)院自動控制教研室內(nèi)部資料, 2004:1-20
[2]孫晶華. 目標(biāo)模擬運(yùn)動支架及控制系統(tǒng)的研制[D]. 西安電子科技大學(xué)碩士學(xué)位論文, 2004:10
[3]DMC5400簡明手冊. 深圳雷賽機(jī)電技術(shù)開發(fā)有限公司[D], 2005:11-13
[4]姜榮. 一種基于運(yùn)動控制卡的伺服電機(jī)控制系統(tǒng)[J]. 測試與控制, 2006(5):113
[5]金鈺. 伺服系統(tǒng)設(shè)計指導(dǎo)[M]. 北京:北京理上大學(xué)出版社,2000

伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理
激光器相關(guān)文章:激光器原理





評論