基于NI cRIO的多通道強震動監測與報警系統開發

4、強震動監測與報警系統的軟件架構及其實現
本文引用地址:http://www.104case.com/article/108860.htm4.1 采集終端的系統軟件架構
采集終端統一的系統軟件架構可以使上位機能通過一致的接口與其交互命令、狀態和數據,方便用戶的使用。
整個數據采集終端的軟件由數據采集和通信兩大部分組成。數據采集又分為數據采集模塊、數據采集引擎、數據存儲引擎、GPS時間引擎、數據壓縮封裝引擎、基于NetSeisIP地震數據流協議傳輸引擎。通信部分則由數據接口、控制接口和調試接口組成,如圖3所示。
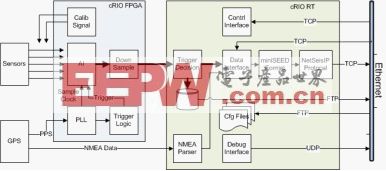
圖3采集終端的系統軟件結構框圖
4.2 采集終端的軟件實現
多通道強震數據采集器終端軟件主要采用LabVIEW 8.6開發,期間調用了C++語言開發的miniSEED地震數據包封裝的動態連接庫。數據采集在FPGA和實時(RT)控制器上實現,集成了GPS同步、數字降采樣、標定信號的多路轉換控制和多種復雜的觸發策略等極具挑戰性的功能。通信部分的接口中,由數據采集器直接將實時數據流壓縮打包成miniSEED格式,并按照NetSeisIP地震數據流的通信協議,發送到遠程的地震流服務器或上位機監控分析軟件,如圖3所示。
1) 數據采集部分運行在FPGA上,主要完成以下任務:
a) 通過鎖相環(PLL)與GPS秒脈沖(PPS)同步,并生成采樣時鐘和觸發邏輯。保證數據采集與GPS同步。時鐘的同步精度<1us,
這使得多個采集站間的數據同步成為可能。
b) 模擬數據通過采集模塊(AI)以24倍的過采樣率采集下來,再經過一個24倍的數字降采樣濾波器(Down Sample)回復到正常采樣率,這樣可以更好的避免信號混疊,并提供更高的動態范圍。
c) 在需要時使用AO輸出標定信號,通過多路開關分配給傳感器以完成標定。
2)數據記錄與傳送部分運行在實時控制器(RT)上,主要完成以下任務:
a) GPS信號解析器(NMEA Parser)接收GPS信息,以提取當前時間和經緯度、高程等地理位置信息。
b) 觸發邏輯模塊通過處理采集到的數據實現靈活有效的存儲觸發策略。











評論