基于ADUC7026的數字PID算法在基站功率控制中的應用

微分環節
本文引用地址:http://www.104case.com/article/106445.htm微分環節能反映偏差信號的變化趨勢(變化速率),并能在偏差信號值變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減小調節時間。
數字PID控制
為便于計算機通過軟件實現PID控制算法,在實際應用中多采用數字PID控制方式。數字PID控制算法通常又分為位置式PID控制算法和增量式PID控制算法。
位置式PID控制算法
按模擬PID控制算法的算式(1),以一系列的采樣時刻點kT代表連續時間t,以和式代替積分,以增量代替微分,則可做如下近似:
u(t)≈u(k);
e(t)≈e(k);
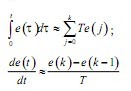
式中:T為采樣周期,k為采樣序號,只要采樣周期T取得足夠小,這種逼近就可以相當精確,于是可得:
![]()
位置式PID控制算法使用全量輸出,所以每次輸出均與過去的狀態有關,計算時要對e(k)進行累加,CPU輸出控制量u(k)對應執行機構的實際位置偏差。因對e(k)量進行累加,u(k)可能出現大幅度變化,進而會引起執行機構的大幅度變化,這種情況在實際生產中是不允許的,在某些場合可能還會造成重大事故,因而產生了增量式PID控制算法。
增量式PID控制算法
當執行機構需要的是控制量的增量時,可由式(2)導出提供增量的PID控制算式。根據遞推原理可得:
![]()










評論