基于LIN總線汽車前燈運動控制系統的設計

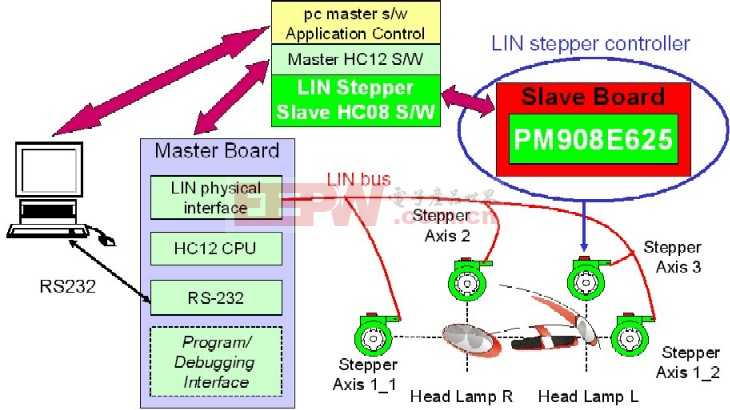
本設計采用的是線性步進電機前燈垂直定位方法。這類電機非常牢靠,并且工作在開環模式下不需要電位計反饋。線性運動通過一個螺栓/螺母組合實現。繞螺栓旋轉的步進電機有一通過定子線圈內的控制電流帶動磁轉子。 用于鹵素前燈水平定位系統、垂直定位、全適應前照明系統(AFS)等。
本文引用地址:http://www.104case.com/article/101025.htm汽車前燈是對汽車夜間行駛安全性很關鍵的器件,控制其位置的電機必須也工作在自動方式,如果通訊總線發生故障,要將燈轉到安全位置。這一要求意味著,驅動器電路必須在不借助外傳感器情況下檢測停轉位置,通過其微步進模式,保證運動無聲而平滑。因此,對任何前燈位置控制架構,不論是集中式的還是分布式的,這些功能都是很基本的特征。
軟件設計
車燈控制系統主要完成兩個功能:一是實現LIN子節點對車燈的控制;二是實現對車燈故障的診斷。在控制中,通過分析總線電位和驅動電路中輸入、輸出、故障診斷引腳的電位來判斷系統是否發生故障。
要使LIN總線節點有效、實時地完成通信任務,軟件設計是關鍵。本設計采用結構化程序設計方案,具有較好的模塊性、可移植性和可修改性。
LIN信息的接收采用中斷方式,當MC68HC908QL4控制器檢測到符合該節點要求的信息幀后,首先判斷本地節點接收到的是什么信息,若為控制信息,則接收2個字節的數據信息;若為查詢信息,則將本地節點車燈的狀態以信息幀的形式發送回主節點,以反映節點情況。然后判斷,若為接收數據幀,則在 SLIC模塊中的數據寄存器(SLCDx)上讀取相應的信息。最后是根據數據信息中相關的位進行車燈控制,在發出控制信號后,相應采集車燈驅動芯片輸入、輸出和故障診斷引腳的電位,驅動車燈的運動狀況,接通水平方向車燈、接通左右方向車燈、AFS照明系統,通過對電位的分析判斷,向驅動電路發出控制信號,若不需要啟動車燈,則發送一個返回信息,返回到掃描車燈的位置。其程序設計車燈控制的流程如圖4所示。
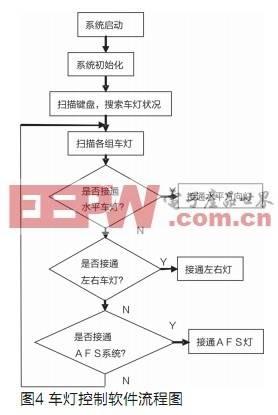
在系統啟動并進行初始化以后, 儀表模塊開始啟動一個定時器, 實現周期性地對儀表盤的車燈按鈕狀態進行掃描, 然后將信息通過 L I N總線傳送到車燈控制模塊, 該信息包含了駕駛員對于車燈狀態的要求( 開通或關斷) 。車燈控制模塊同時對數字量診斷輸出的車燈信息和模擬電流傳感器診斷輸出的車燈進行檢測,對于出現故障的車燈信息,通過 L I N總線傳輸到儀表模塊上。傳輸信息包括車燈的名稱、車燈所在的位置和車燈狀態等 。車燈控制模塊結合儀表模塊判斷結果及儀表盤的掃描結果, 決定是否打開車燈或關閉車燈。儀表模塊通過 L I N總線接收/傳送車燈控制模塊的信息。







評論