海洋環境地磁場三分量測量儀的設計與實現

2.海上任意地點 `
` `
` 的求解
的求解
3.A矩陣的變換形式
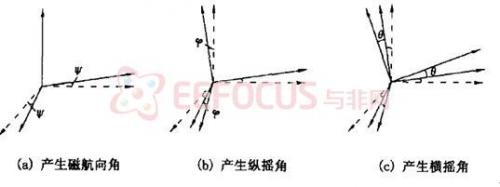
對于任意的艦船姿態,都同時包含了艦船的橫搖、縱搖和航向3種狀態信息,但是為了分析問題的方便,可以把這種姿態看作是艦船沒有縱搖和橫搖角,并且處于正北磁航向狀態的時刻,順序經歷了航向、縱搖和橫搖改變的3個獨立階段后形成的。亦即艦船在第一時刻只發生航向的改變,產生磁航向角 (見圖1(a));然后在經歷一次縱向搖擺,產生橫搖角  (見圖1(c))。經歷這三個狀態以后,艦船的姿態就確定了。
(見圖1(c))。經歷這三個狀態以后,艦船的姿態就確定了。
因此,可以將A矩陣寫成3個矩陣 相乘的形式,即 ,其中:

4.磁場3分量獲得
對于任意航向上、任意測量船姿態下,磁傳感器處獲得的磁場值為:
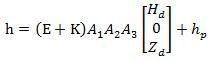 (2)
(2)
對于具體某一條測量船來說,其K矩陣和固定干擾  一旦測出就是一個不變量,而磁場h值又是可以從三分量磁傳感器直接讀得的,因此在這里只有`` 是未知量。故將(2)式作如下變形:
一旦測出就是一個不變量,而磁場h值又是可以從三分量磁傳感器直接讀得的,因此在這里只有`` 是未知量。故將(2)式作如下變形:
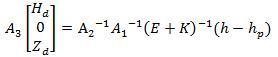 (3)
(3)
很容易看出(3)式右側各參數都是已知的,不妨設 ,其中向量T的物理意義是艦船不存在縱橫搖時、任意航向下地磁場在艦船坐標系上的投影。這樣可以將(3)式寫成:
,其中向量T的物理意義是艦船不存在縱橫搖時、任意航向下地磁場在艦船坐標系上的投影。這樣可以將(3)式寫成:
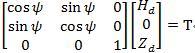
從而分別得到

3.2 硬件資源配置
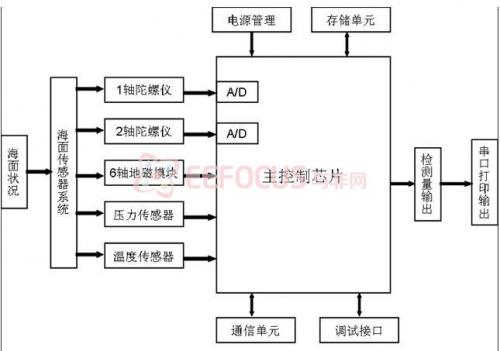
硬件配置圖
該系統主要完成海平面上各種信息量的采集,并計算得出需要的結果。該系統主要由以下幾個部分組成:微處理器模塊、傳感器模塊、電源模塊和檢測量輸出模塊,原理圖如上。

評論