示波器探頭基礎系列之一《示波器探頭淺談之無源探頭》

二、無源電壓探頭的校準
討論到這里,對于無源探頭的輸入模型大家應該有了一定的了解,那為什么為了精確地測量,兩個RC時間常量(RpCp和R1C1)必須相等,測量前需要校準呢?我們可以再進一步簡化探頭模型為一個更簡單的阻容分壓電路如下:
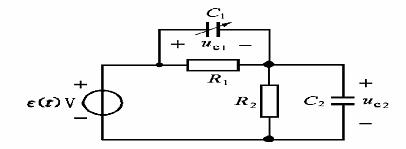
讓我們來進行一個簡單的推導計算:
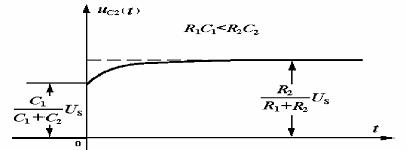
1.計算初始值uC2(0+)由于電容電壓發生躍變,要根據電荷守恒定律和KVL來確定
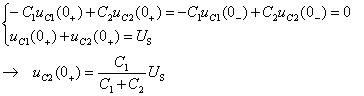
2.計算穩態uC2(¥)電容開路時,按照電阻分壓公式得到

3.計算時間常數

4.用三要素公式得到電容電壓uC2(t)

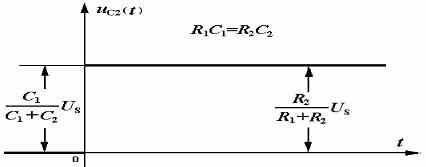
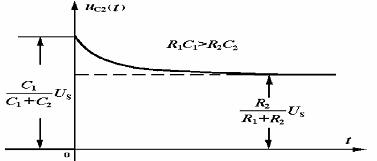
我們可以看到,波形有3種情況:
1.完全補償

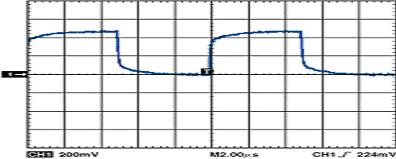
2.過補償

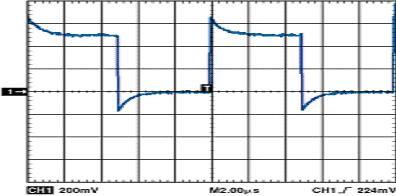
3.欠補償

以下圖示給出了欠補償、過補償和合理補償三種情況下探頭產生的波形。
探頭欠補償波形圖
探頭過補償說明圖
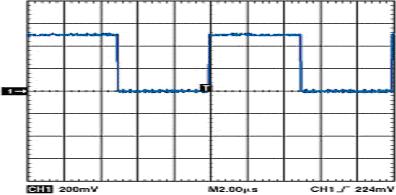
探頭正常補償說明圖
所以,在獲得一臺可以工作的示波器和探頭后應該要做的第一項工作是校準探頭以保證其內部RC時間常量匹配。這時需要將探頭連接到示波器的探頭補償輸出。然后使用非磁性調節工具調節補償箱中的調節螺螺絲完成校準一直觀察到平坦的波形響應。不要太頻繁校準,因為沒有必要。
本文關于無源電壓探頭模型的參數設定以及校準的原理就介紹到這里,而對于示波器和探頭以及數字測量在業內有很多的經典理論以及應用原則,比如信號的滾降特性,DSP信號濾波的處理。如何確保最真實的還原待測信號,大家可以參閱更多專業的書籍。 希望本文的介紹可以讓硬件工程師們更深入和全面的了解我們的測量工具,真正做到還原真實信號。

評論