臺達總線型運動控制器10MC在16頭高速繞線機上的應用

假設:骨架長度為L、漆包線線徑為R、每層繞線圈數為N,則N=L/R。
凸輪曲線如圖4和圖5所示。

圖4 繞線軸凸輪表

圖5 旋轉軸凸輪表
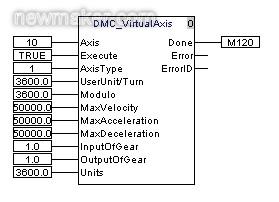
圖6 虛軸的建立
圖7 繞線功能的MC運動程序
圖8 繞線過程中暫停和重啟的MC運動程序
啟動時,使用MC_Power使能伺服驅動器,然后再用它的完成未去使能絕對位移指令,那么伺服會從暫停的位置開始,重新跑完未完成的距離。
1.4纏腳功能的實現
在繞線開始時和繞線結束后,要把漆包線纏繞在相應骨架的Pin腳上,那么就需要進行纏腳的動作,此功能也是通過電子凸輪來實現,首先建立一個虛軸,讓這個虛軸作為主軸,以X,Y,Z三個實軸作為從軸,從軸與主軸之間通過凸輪表建立相應關系,主軸運動時,從軸跟隨主軸做相關動作。
纏腳的模式分為兩種,一種是以Z軸為纏繞軸,以X,Y軸作為平面軸進行纏腳;一種是以X軸作為纏繞軸,以Y,Z軸作為平面軸進行纏腳,纏腳的框圖如圖9所示。
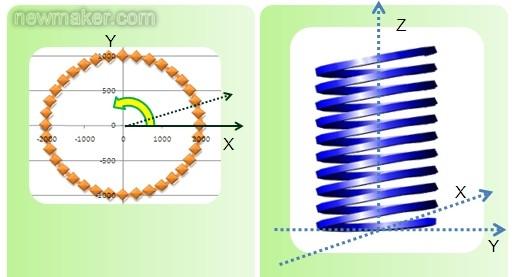
圖9 纏腳框圖

評論