主動安全咋實現,給你汽車離道報警系統完整解決方案

1.1 項目背景
本文引用地址:http://www.104case.com/article/201612/330138.htm隨著汽車的普及和高速公路的興建,汽車的主動安全性能受到人們越來越多的關注,安全輔助駕駛已成為國際智能交通系統研究的重要內容。然而,研究表明,在駕駛員--汽車--道路3個環節中,駕駛員是可靠性最差的一個環節,80%以上的交通事故來自于駕駛員的錯誤。據統計,其中約有44%的交通事故與車輛行駛偏離正常車道有關,其主要原因是駕駛員注意力不集中或者疲勞駕駛,造成車輛的無意識偏離。針對此情況,行車過程中的車道檢測及報警的研究,受到了世界各國的高度重視。
1.2 系統功能及項目目標
系統的主要功能分為下面五個部分:
(1)通過攝像機獲取車道信息,即視頻幀圖像
(2)對得到的視頻幀圖像進行預處理
(3)對預處理后的圖像進行邊緣提取,獲得車道標識
(4)根據車道標識進行離道評估
(5)根據評估結果做出相應報警措施
系統的要求及目標:
(1)系統的所有功能和算法都使用FPGA實現
(2)系統能滿足實時處理要求,達到系統的實用性
2.項目方案
2.1 功能模塊
從功能上,車道偏離報警系統可分為4個功能模塊,分別是:車道識別預處理(Preprocessing)、車道模型判斷(Mode Selection)、車道識別(Lane Detection)和道路偏離判斷(Warning),采用例圖表示系統功能,如圖一所示。
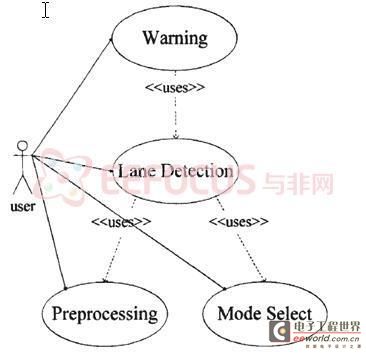
圖(一)車道偏離報警系統結構圖
1. 車道識別預處理模塊
車道識別預處理模塊是整個系統的基礎,車道邊緣特征點提取模塊主要包括一些預處理的平滑算法,基于灰度閾值分割的車道外邊緣檢測和車道圖像的二值化處理。
2. 車道判斷模塊
車道判斷模塊,根據道路的先驗知識,通過直線或者曲線模型來確定車道線,將車道檢測轉化為確定數學模型的參數。車道模型分為直線模型,曲線模型和組合模型三種。
3. 車道檢測模塊
車道檢測指在沒有道路先驗信息條件下,確定車道標志線的位置,用直線或者曲線擬合車道特征點,得到車道線的數學模型,用于車道偏離預警的判斷。
4. 道路偏離模塊
道路偏離模塊根據車道檢測模塊得到的數據,利用車道偏離警告標準進行車道偏離判斷,根據判斷的結果和給定的閾值比較,做出相應警告。
從用例圖中可以看出這四個模塊的相互關系,在圖像預處理模塊和車道模型選擇模塊的基礎上,啟動車道檢測模塊。預警模塊則依賴于車道檢測模塊,根據車道檢測的參數,判斷是否預警。
2.2 處理流程
該系統的流程圖如圖二所示:
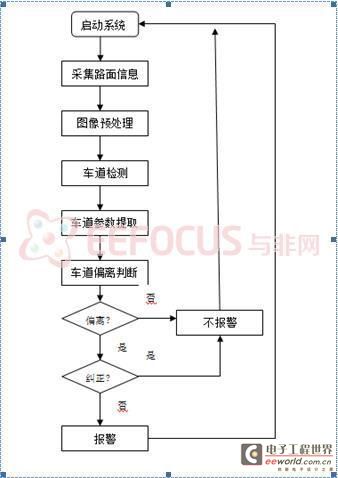
圖(二)車道偏離報警系統流程圖
1.視頻圖像采集
根據攝像頭的安裝位置,攝像頭可以分為側視攝像(攝像頭安裝在車輛側面)和前視攝像(攝像頭安裝在車輛前部,斜指向車輛的前方),本系統中采用前視攝像方式。
2.圖像預處理
圖像在采集過程中,由于路面存在坡度,障礙物,車道在遠方還有天空等信息,這些信息具有很強的干擾性,因此捕獲得到的車道不能直接用于車道檢測。需要通過一些圖像初始化,選擇感興趣的區域,以減少干擾和提高計算性能。為了消除噪音的影響還要做低通濾波,最后還要采用利用閾值對圖像進行二值化分割,以獲取更為清晰的車道線,簡化了車道線檢測。
3.車道檢測
車道檢測指在沒有道路先驗信息條件下,確定車道標志線的位值,用直線或者曲線擬合車道特征點,得到車道線的數學模型,用于車道偏離預警的判斷。車道的視頻圖像具有連續性,車道線不會發生突變,因此,對于車道特征不明的單幀圖像,可以引入前一幀圖像的車道模型參數,提高檢測的精度。同時,在前一幀車道線周圍設置感興趣區域,縮小檢測范圍,提高檢測速度。
4.車道偏離判斷
車道偏離判斷的警告標準可以分為四種,基于車輛在車道中的當前位置,基于將來偏移量的不同,基于車輛將橫越車道邊界的時間,基于知識的道路場景感知。
2.3 硬件架構
本設計采用Xilinx公司的Nexys 3 Spartan-6 FPGA Board開發板,利用其上的Xilinx Spartan®-6 FPGA (XC6LX16-CS324) 的大容量邏輯資源完成各個模塊。根據2.2節中的處理流程,系統應該包括以下模塊:視頻數據提取模塊,預處理模塊,車道檢測模塊,車道偏離模塊,整體的硬件架構如圖三所示:
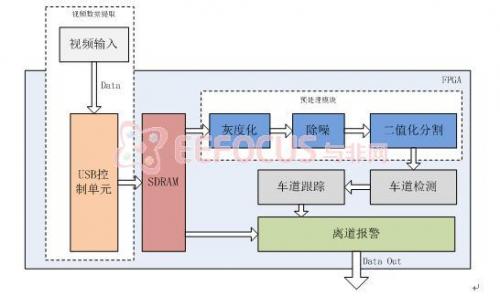
圖(三)硬件架構圖
視頻數據提取模塊復雜提取車道視頻圖像,并通過USB控制單元將視頻幀傳輸到預處理模塊。在預處理模塊對視頻幀圖像進行加強,得到車道與背景分割的二值化圖像。在車道檢測模塊中將二值化圖像的中的車道進行擬合,得到清晰穩定的車道信息。最后根據車道的信息參數,判斷汽車離道。

評論