機器人技術電路設計圖集錦

器發射超聲波。
本文引用地址:http://www.104case.com/article/201612/326690.htm圖5給出由數字集成電路構成的超聲波振蕩電路,振蕩器產生的高頻電壓信號通過電容C2隔除掉了信號中的直流量并給超聲波換能器 MA40S2S。其工作過程:U1A和UlB產生與超聲波頻率相對應的高頻電壓信號,該信號通過反向器U1C變為標準方波信號,再經功率放大,C2隔除直流信號后加在超聲波換能器MA40S2S進行超聲波發射。如果超聲波換能器長時間加直流電壓,會使其特性明顯變差,因此一般對交流電壓進行隔除直流處理。 U2A為 74ALS00與非門,control_port(控制端口)引腳為控制口,當control_port為高電平時,超聲波換能器發射超聲波信號。
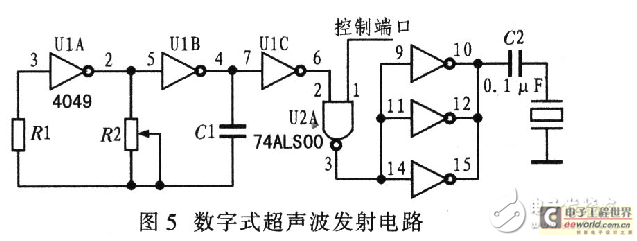
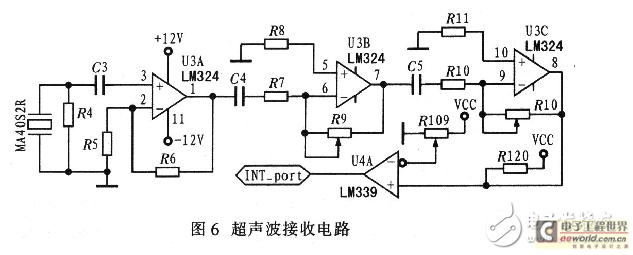
圖6示出為超聲波接收電路。超聲波接收換能器采用MA40S2R,對換能器接收到的信號采用集成運算放大器LM324進行信號放大,經過三級放大后,通過電壓比較器LM339將正弦信號轉換為TTL脈沖信號。INT_Port與單片機中斷管腳相連,當接收到中斷信號后,單片機立即進入中斷并對超聲波信號進行處理和判斷。
根據競技機器人的功能要求進行總體設計,將各個功能進行模塊化,其控制系統硬件框圖如圖所示。中央處理器采用微控制器結構,用以控制外圍設備協調運行。舵機控制機器人的運動方向;驅動電機電動機采用輸出軸配有光電編碼器的小型直流電機驅動車輪旋轉。電磁鐵作為機械手夾緊的執行元件。設置了兩路超聲波傳感器、8路光電檢測輸入和8路開關量檢測接口。
TOP6 機器人接觸式物體探測技術電路設計
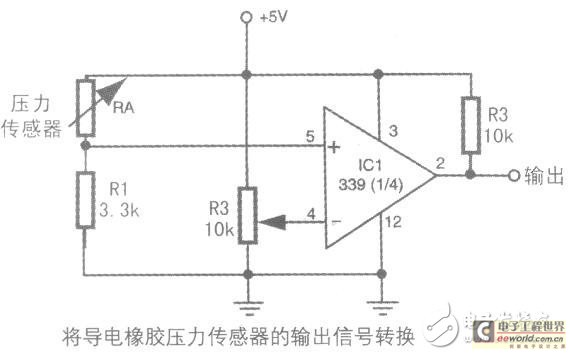
下圖中給出使用導電橡膠片的比較合理的接口電路。導電橡膠片和一個3.3k電阻串聯在地與電源正電壓之間形成了分壓器。當導電橡膠片受壓時,傳感器的輸出端的電壓就會變化。傳感器的輸出端就是壓電片和電阻之間的一點,此信號連接到比較器339的反向輸入端引腳上。當壓電片的電壓超過了比較器的參考電壓時,比較器輸出狀態改變,就表示碰撞發生了。這個比較器的輸出可以用來驅動一個控制馬達方向的繼電器上或者直接連接到一個微處理器或計算機端口上。
多路碰撞開關
當有許多開關或者近距離探測設備布置在機器人的周圍時會怎樣呢?不得不把每個開關的輸出連接到電腦里,但是那樣做浪費了很多外設端口。一個比較好的解決辦法是利用一個優先編碼器或者多路轉換器。這兩個方案允許在一條公共控制線路上連接多個開關。機器人的微處理器或計算機將查詢這條控制線,而不是每個開關或近距離探測設備。
使用優先編碼器電路設計
下圖中的電路使用了一塊74148優先編碼器集成塊。
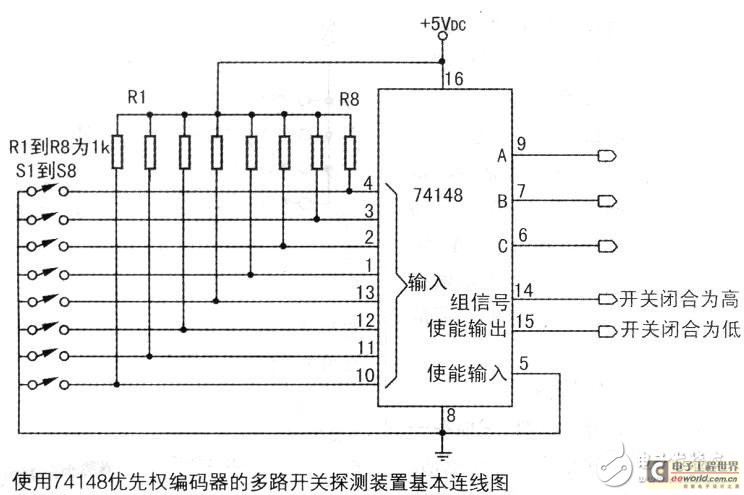
集成塊的輸入端就是那些開關的輸出。 當一個開關閉合,相應的二進制編碼就會出現在A-B-C輸出引腳處。對于優先編碼器,只有開關中最高的值才能在輸出端顯示出來。換句話說,如果開關4和7都閉合了,那么輸出端只能反應引腳4閉合。
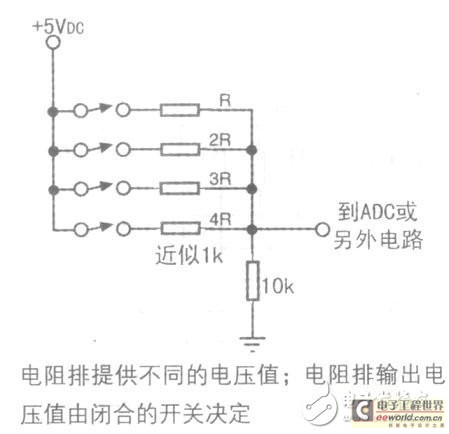
使用電阻分壓排電路設計
如果機器人的計算機或者微控制器中有模一數轉換器(ADC)或者可以添加一個,就能以另一種技術實現多路開關接口:電阻分壓排。概念十分簡單,像圖18 所示。每個開關通過一個電阻的一端接地,而+V電壓串接另一電阻到各開關上。多個開關則并行接入ADC的輸入端,如圖所示。這些電阻形成了一個分壓器。由于每個電阻值都不同,所以當某一開關閉合時,對應的電壓值都是獨一無二的。注意,由于電阻是并聯的,所以一次可能有多個開關閉合。從而得到一個中間值。要對連接每個開關的電阻值進行摸索實驗以獲得最大的靈活性。
TOP7 智能跟隨紅外發送接收電路設計
系統的智能跟隨功能是通過紅外實現的,音樂機器人上的紅外接收器感知到紅外線時,會追蹤紅外發射源,感知不到時,會原地旋轉重新搜索紅外發射源,直至 重新 定位方向。紅外發射源是由10 個紅外發射管組成,將10 個紅外發射管均勻擺放在一個球體表面,使得紅外發射源可以向四面八方輻射紅外線,保證音樂機器人更加快速準確地尋找到紅外發射源。紅外發射管發射的載波頻 率為38 kHz 占空比為50%的方波。紅外的發射和接收電路如圖4所示,10.0 連接一個普通I/O 引腳,控制紅外線的通斷,即接通4 ms,然后關斷11 ms,反復進行接通與關斷。 連接一路PWM 方波,方波的頻率是38 kHz.一共有10 路紅外發射管。
紅外接收裝置采用2 個紅外接收器1838,分別安裝在音樂機器人的頭部和尾部。兩個接收器的輸出引腳分別連接單片機的10.2 和10.7 引腳。紅外接收器1838 對38 kHz 頻率的紅外線敏感,所以紅外接收器1838 可以檢測到紅外發射源的方位,從而驅動電機向外發射源的方向前進。
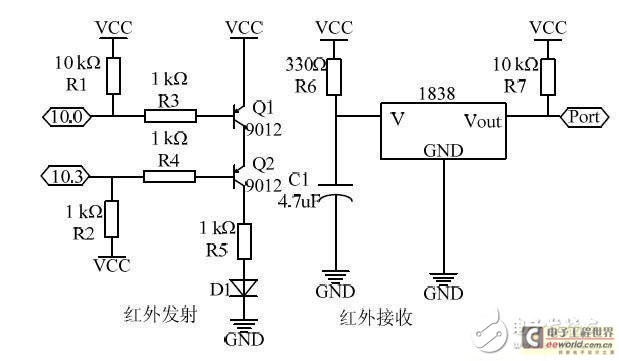
圖4 智能跟隨紅外發送接收電路
拍手信號捕獲電路設計
電路利用麥克風采集聲音信號,然后利用LM324 對采集來的信號進行比例放大,放大的比例為100 倍,然后接過兩個1N5819 和一個104 獨石電容進行包絡線檢測,最后利用LM358 作為電壓比較器,利用1 K 電阻和880Ω電阻分壓獲得比較電壓值,其電路如圖5 所示。機器人的移動采用驅動直流電機帶動輪子轉動實現,即控制直流電機的正反轉和速度,系統直流電機驅動芯片采用SGS 公司的L298N,內部有4 通道邏輯驅動電路。用三極管組成H 型平衡橋,驅動功率大,驅動能力強。同時H 型PWM 電路工作在晶體管的飽和狀態與截止狀態,具有非常高的效率。
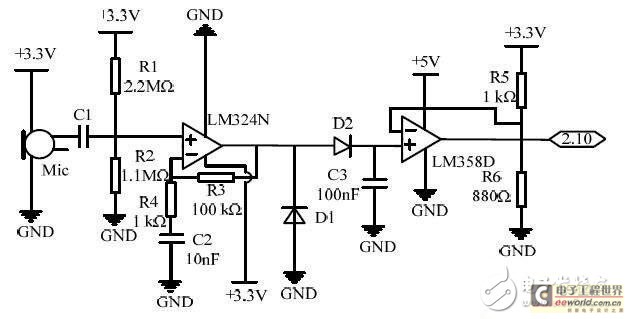
圖5 拍手信號捕獲電路
直流電機驅動電路設計
電機的轉速取決于3 個因素:負載、電壓和電流。對于一個給定的負載,可以通過脈沖寬度調制的方法來使電機保持穩定的速度。通過改變施加在直流電機上的脈沖寬度,可以增加或減小電機的轉速。調整脈沖寬度,即改變占空比,調整電機的速度。驅動板采用6 個高速光耦6N137 實現驅動電路與邏輯電路的隔離,這樣可以有效地避免驅動電路與邏輯電路之間的相互干擾。驅動板的電路原理圖如圖6 所示。
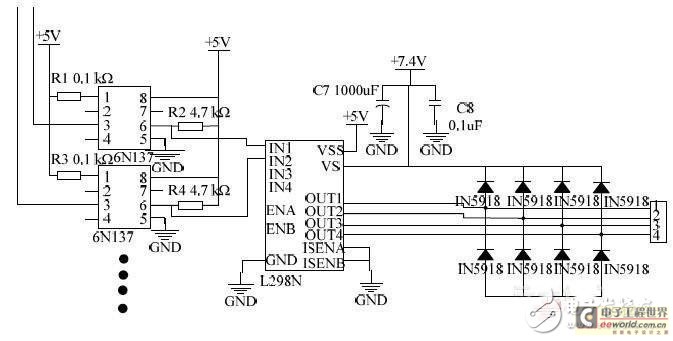
圖6 直流電機驅動電路
通過軟件編程可以自由改變單片機兩路PWM脈沖信號的占空比,電機的A 端連接PWM 脈沖信號,電機的B 端連接單片機的一個I/O 引腳。當這個I/O 引腳置1 時,電流從電機的B 端流向電機的A 端;當這個I/O 引腳置0 時,電流從電機的A 端流向電機的B 端,這樣電機就可以改變電機旋轉方向,同時控制PWM 脈沖信號的占空比值還可以改變電機旋轉速度,實現轉向和轉速的控制。
TOP8 吸塵機器人控制系統電路設計
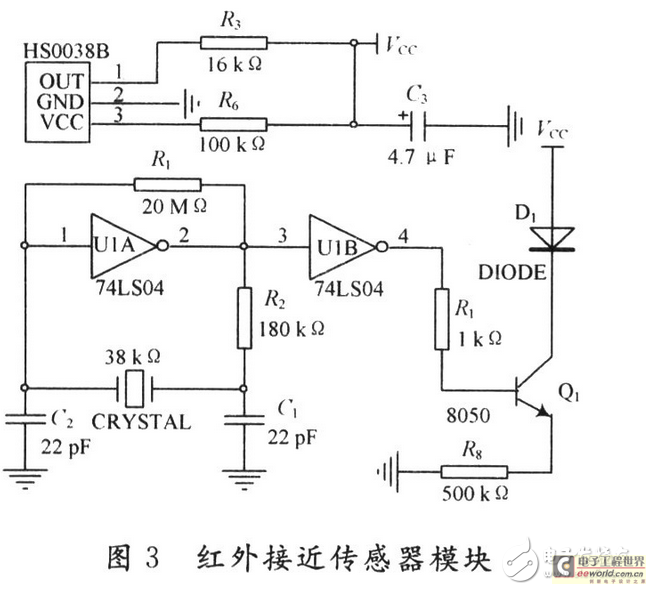
紅外接近傳感器電路設計
反射式光電開關是由紅外LED光源和光敏二極管或光敏晶體管等光敏元件組成,當有障礙物阻攔時光線能夠反射回來,輸出為低電平信號;當沒有障礙物阻攔時,光線不能反射回來,輸出為高電平信號。吸塵機器人的近距離紅外接近傳感器由兩組相同的紅外發射、接收電路組成。每一組電路可分為高頻脈沖信號產生、紅外發射調節與控制、紅外發射驅動、紅外接收等幾個部分。通過38kHz晶振和非門電路得到一個38kHz的調制脈沖信號;利用三極管驅動紅外發射管(TSAL6200)的發射。發射管發出的紅外光經物體反射后被紅外接收模塊接收。通過接收頭(HS0038B)內部自帶的集成電路處理后返回一個數字信號,輸入到微控制器的I/O口,如圖3所示。接收頭如果接收到38kHz的紅外脈沖就會返回輸出低電平,否則就會輸出高電平。通過對I/0口的檢測,便可以判斷物體的有無。
兩種電機控制系統電路設計
在小功率系統中,直流電機線性特性良好,控制性能優越,適合于點位和速度控制。為了實現直流電機的正反轉運行,只需要改變電機電源電壓的極性。電壓極性的變化和運行時間的長短可以由處理器實現,而提供直流電機正常運行的電流則需要驅動電路。
H橋式驅動電路是比較常用的驅動電路。該設計兩個行走驅動電機采用分立器件功率場效應管和續流二極管搭建,成本低,便于散熱,如圖所示。
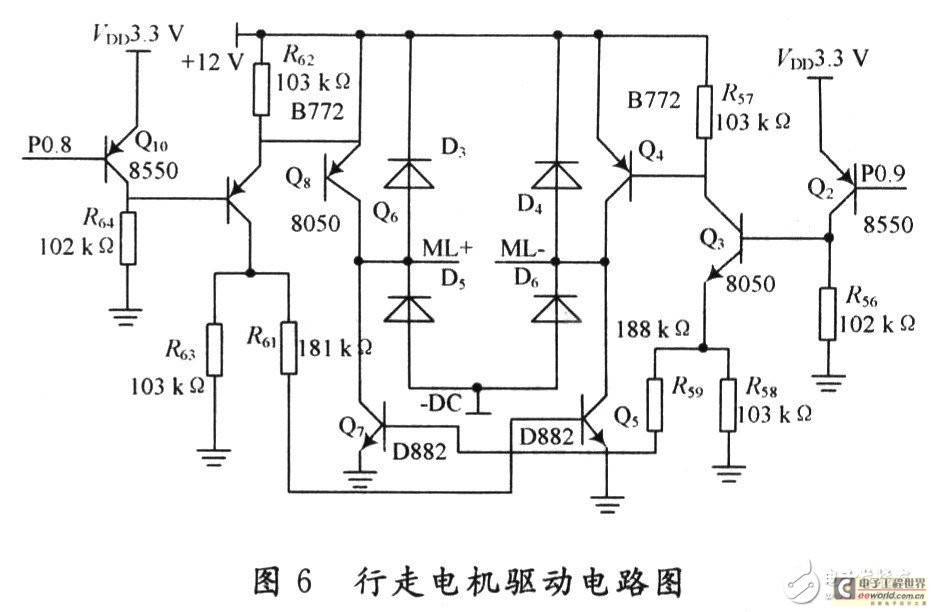
用ARM7的P0.8和P0.9來控制電機,這兩個管腳都是PWM輸出管腳,可以控制電機的速度。該部分主要保證機器人能夠在平面內移動,同時輪上帶有編碼器,可以對行走的路程進行檢測。通過航位推算可以實現機器人的轉彎,假設機器人光電碼盤的分度數為N;控制器收到的脈沖數為m;輪子的直徑為D;兩個輪子之間的間距為W,則輪子前進的距離即可算得。
清潔機器人作為服務機器人的一種,有著巨大的市場潛力和廣闊的應用前景。隨著傳感技術的發展和微處理器的不斷進步,價格也在不斷下降。在此研究和設計一個基于ARM7微處理器的清潔機器人控制系統,不僅滿足了實用性的要求,而且在不增加成本的基礎上為軟件提供了良好的硬件支持,為更好的算法和軟件升級提供良好的技術支持。若讀者對機器人技術感興趣,不妨多探討一下未來發展趨勢以及最新革新技術走勢等等。
TOP9 基于AT89C52自動追蹤紅外線源機器人電路設計
紅外線傳感器電路下見圖。在機器人左、中、右三個方向放置傳感器以檢測紅外線發射源的位置,當某個傳感器接收到紅外線源后輸出一個下降沿至74121的 4腳A2端,根下據圖中電容C4、C5

評論