智能視覺高速尋線機器人導航系統電路設計

核心控制器設計
本文引用地址:http://www.104case.com/article/201612/324444.htm為了實現視頻采集,考慮綜合性價比、設備安裝等因素,核心控制器選用Freescale公司的16位高性能單片機——MC9S12DG128(以下簡稱S12)。它的指令處理時鐘可以達到38MHz,其A/D轉換器的工作時鐘可以達到16MHz,用于采集視頻。同時它擁有8路PWM通道,控制舵機和直流電機完成轉向和速度控制;8路捕捉/比較通道獲取作為速度傳感器的編碼器脈沖信號;串行通信接口用于無線調試;多達64 個IO(通過IO復用方式)足夠用于狀態顯示及參數設置。另外,其擁有128k的flash存儲空間,無需進行存儲器擴展,在片內就可以實現視頻數據存儲和調用。如圖2所示,整個系統采用一塊單片機,無需添加其他控制器、存儲器,成為真正的“單片”系統。
視頻采集模塊
由于單片機A/D速度限制,需要選用低分辨率的黑白攝像頭。因為低分辨率意味著視頻單行掃描時間的增加,而黑白攝像頭意味著只需要單路A/D就可以完成視頻采集工作。選擇了Omvision生產的ov5116芯片為內核的CMOS黑白攝像頭,分辨率為320×240,圖像刷新頻率50Hz。同時選用LM1881視頻同步信號分離芯片提取視頻信號中的行同步和場同步信號,連入s12的脈沖捕捉通道。通過捕捉信號觸發AD模塊工作,采集存儲視頻數據。
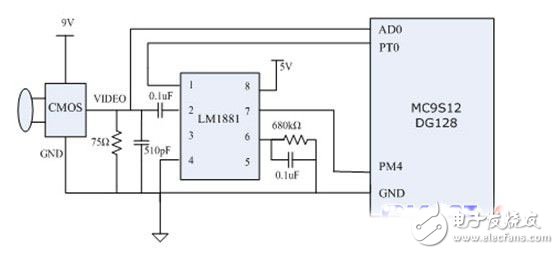
圖3 視頻采集電路原理圖
電機控制及電源
RS-380SH直流電機作為主驅動電機,通過PWM信號控制。選用Freescale公司的MC33886全橋驅動芯片,通過兩路半橋實現電機正反轉。這里的電機反轉并不為實現倒車,而主要用于車體減速。在進行電機正反轉切換時,電機驅動電流會隨著負載增大而瞬間放大,因此需要增大穩壓能力,保證系統正常工作電壓,避免單片機自動重啟。在整個系統中,有多種電壓需求,單片機和舵機為5V供電;CMOS攝像頭為 6~9V。因此,為了方便開發,這里選用最常用的7.2V充電電池組。只需在系統內加入5V穩壓芯片,提供5V電壓。
本文設計了一個基于視覺的以高速尋線為目的的行走機器人系統。系統采用一塊高性能單片機,完成了從視頻采集到視頻處理,最終實現速度和轉向控制的一套尋線行走功能。系統輕便靈巧,無需存儲器擴展和其他可編程器件配合,搭建費用低。該方案在參加第一屆全國大學生智能車大賽中,系統運行平穩,取得了非常優異的成績。

評論