機器視覺采集系統應用電路揭秘

有線視覺導航技術的優點是:可以獲取較大容量的信息、具體路徑的設置與變化比較簡單、系統具有較好的柔性等,而且具有現實應用的可行性和比較廣闊的前景,是現今AGV的先進的導航技術和重要發展方向。車載攝像裝置主要是由CCD攝像機、圖像采集卡、光源等設備組成。攝像裝置采集信息的電路原理圖見下圖:
本文引用地址:http://www.104case.com/article/201612/324442.htm 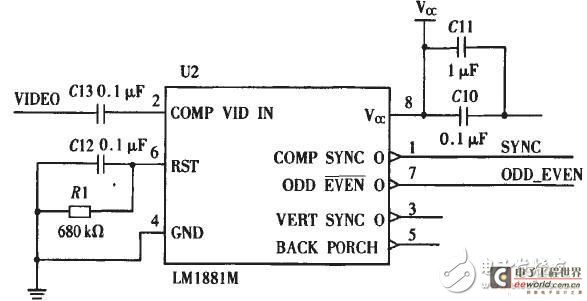
攝像頭采集電路圖
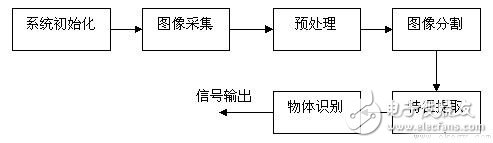
在視覺系統啟動后,AGV的車載CCD攝像機就對小車前方的路徑進行相應的圖像采集,經過圖像采集卡后,經過處理后送到相應的上位計算機。AGV的上位計算機經過對地面的信息進行適當圖像處理(主要包括閾值處理、掩膜、直方圖分析、圖像分割、邊緣檢測、區域增長)與圖象分析(主要包括特征攝取、物體識別、位置大小和方向以及圖像其它物理特征的分析和較深度的信息處理),進而形成相應的控制指令,再傳到車載計算機(單片機),進而控制AGV的相應的動作。視覺系統的工作原理的示意圖:

評論