車輛模擬駕駛訓(xùn)練系統(tǒng)動感系統(tǒng)設(shè)計

1 引言
車輛模擬駕駛訓(xùn)練系統(tǒng)是一種利用現(xiàn)代技術(shù)手段模擬真車駕駛的仿真系統(tǒng),它可以使汽車駕駛訓(xùn)練更加安全、經(jīng)濟、高效和逼真。與現(xiàn)有車輛模擬駕駛訓(xùn)練系統(tǒng)相比,新型車輛模擬駕駛訓(xùn)練系統(tǒng)的獨特之處是增加了動感系統(tǒng)。該動感系統(tǒng)可以使駕駛員在模擬駕駛室內(nèi)真實感受到模型車所行駛的沙盤路面的狀況,與實車在正常路面上行駛的感覺一樣,從而彌補現(xiàn)有車輛模擬駕駛訓(xùn)練系統(tǒng)的不足,提高駕駛訓(xùn)練的效果。
2 系統(tǒng)的組成及工作原理
新型車輛模擬駕駛訓(xùn)練系統(tǒng)中的動感系統(tǒng)主要由動感數(shù)據(jù)采集系統(tǒng)、動感數(shù)據(jù)無線發(fā)收系統(tǒng)、動感平臺及其控制系統(tǒng)組成。
工作原理是:安裝于模型車上的動感數(shù)據(jù)采集系統(tǒng)實時采集模型車行駛過程中姿態(tài)的動感數(shù)據(jù),通過無線收發(fā)系統(tǒng)將動感數(shù)據(jù)實時傳送到動感平臺控制系統(tǒng),進而使動感平臺產(chǎn)生相應(yīng)的動感。
3 硬件設(shè)計
3.1 動感數(shù)據(jù)采集系統(tǒng)
動感系統(tǒng)的動感數(shù)據(jù)采集使用HMR3000型數(shù)字羅盤模塊。HMR3000是Honeywell公司的產(chǎn)品,它不僅可以測量磁場,還可以測量物體的姿態(tài),實時準確地輸出被測物體的俯仰角、橫滾角和航向角。用單片機和HMR3000組合構(gòu)建適用于機載或車載的測控系統(tǒng),可廣泛應(yīng)用于航海、通信雷達、微波定向、海上平臺控制、天線安裝、無人機、機器人、運動定向、自動控制等方面。
HMR3000體積小、功耗低、精度高、價格便宜,是姿態(tài)測量用戶的理想選擇。
3.1.1 HMR3000的數(shù)據(jù)輸出格式
HMR3000數(shù)字羅盤按照NMEA0183的格式,通過所帶的RS-232接口輸出數(shù)據(jù)。輸出6種格式:HDG格式、HDT格式、XDR格式、HPR格式、RCD格式和CCD格式。動感系統(tǒng)采用的是如下所示的HPR格式:$PTNTHPR,x..x(航向),a,x..x(俯仰角),a,x..x(橫滾角),a*hh該數(shù)據(jù)輸出格式將HMR3000的3個重要測量結(jié)果和相應(yīng)的測量狀態(tài)結(jié)合在一起。數(shù)據(jù)中的x..x為所測的相應(yīng)航向角、俯仰角和橫滾角的值,形式為n位ASCⅡ碼,單位可以是“度”也可以是“mils”。數(shù)據(jù)中的“a”表示測量狀態(tài)。測量狀態(tài)有以下6種:
L=LOW ALARM(低級報警);
M=LOW WARNING(低級警告);
N=NORMAL(正常);
O=HIGH WARNING(高級警告);
P=HIGH ALARM(高級報警);
C=TUNING ANALOG CIRCUIT(調(diào)節(jié)模擬電路)。
如果1個輸出語句的3個狀態(tài)指示中有任何1個報警,航向位置將為空白。報警和警告的閾值可以在EEPROM中更改。
3.1.2 HMR3000的控制指令
工作:羅盤啟動,指令為#FAO.3=1*26<CR><1f>;
停止:羅盤停止,指令為#FAO.3=0*27<CR><1f>;
詢問:詢問羅盤啟動、停止?fàn)顟B(tài),指令為#FA0.3?*15<CR><lf>;
響應(yīng):有二種響應(yīng),工作狀態(tài)響應(yīng)為#1*31<CR><lf>;停止?fàn)顟B(tài)響應(yīng)為#0*30<CR><1f>。
3.1.3 HMR3000的數(shù)據(jù)單位和進制的設(shè)定指令
數(shù)據(jù)單位可以分為“度”和“mils”二種。度=mils×9/160,其中,度的數(shù)值是0.0"359.9,而mils的數(shù)值是0"6 399。進制分為十進制和十六進制二種。設(shè)定數(shù)據(jù)單位和進制的指令如下:
#FA0.4=1*21<CR><lf> ∥殳定羅盤數(shù)據(jù)單位為“度”
#FA0.4=0*20<CR><lf> ∥設(shè)定羅盤數(shù)據(jù)單位為“mils”
#FA0.5=1*20<CR><lf> ∥設(shè)定羅盤數(shù)據(jù)為十進制
#FA0.5=0*21<CR><lf> ∥設(shè)定羅盤數(shù)據(jù)為十六進制
3.1.4 HMR3000數(shù)據(jù)采集速率的設(shè)定指令
HMR3000的數(shù)據(jù)輸出有6種格式,對應(yīng)的數(shù)據(jù)采集速率格式也有6種,其中HPR格式更新速率指令為
#BAD=I*hh<CR><lf> ∥設(shè)定HPR的更新速率為“I”句/s
其中I的值可以設(shè)為0、l、2、3、6、12、20、30、60、120、180、300、413、600、825、1200。
3.1.5 HMR3000姿態(tài)數(shù)據(jù)的查詢指令
HMR3000啟動后會按照指定的工作模式發(fā)送數(shù)據(jù),一般會選擇連續(xù)工作方式。需要查詢當(dāng)前的數(shù)據(jù)狀態(tài)和具體數(shù)值時需要使用查詢指令。HPR格式的查詢指令為
$PTNT,HPR*78<CR><lf> ∥查詢HPR格式的數(shù)據(jù)狀態(tài)
3.1.6 HMR3000與MCU的接口連接
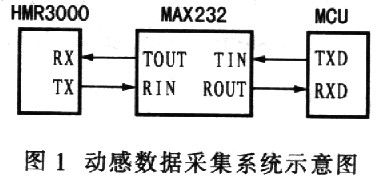
由于HMR3000與外界的串行通信采用的是自身所帶的RS-232接口,與MCU串行數(shù)據(jù)傳輸?shù)腡TL電平不匹配,所以需要MAX232型電平轉(zhuǎn)換器,如圖1所示。
3.2 動感數(shù)據(jù)無線收發(fā)系統(tǒng)
動感數(shù)據(jù)無線收發(fā)系統(tǒng)采用nRF905型無線收發(fā)模塊,該模塊具有以下突出特點:
●三頻段收發(fā)合一,工作頻率為國際通用的ISM頻段433/868/915 MHz;
●GMSK調(diào)制,抗干擾能力強,特別適合工業(yè)控制領(lǐng)域;
●采用DSS+PLL頻率合成技術(shù),頻率穩(wěn)定性極好;
●靈敏度高,達到-100 dBm;
●工作電壓低(2.7 V),功耗小,待機狀態(tài)僅為1 μA,可滿足低功耗設(shè)備的要求;
●最大發(fā)射功率達+10 dBm;
●具有多個頻道(最多170個以上),能滿足需要多信道工作的特殊應(yīng)用;
●工作速率最高可達76.8 kb/s;
●外圍元件數(shù)目少(僅10個),基本上無需調(diào)試;
●由于采用低發(fā)射功率、高接收靈敏度的設(shè)計,使用無需申請許可證,使用距離最遠可達l 000 m。
此外,由于nRF905是一款收發(fā)一體化的無線傳輸電路,帶有調(diào)制器和解調(diào)器,發(fā)送時可以自動打包,接收時可以自動進行地址匹配、自動CRC檢驗,發(fā)送或接收完畢后,其DR引腳會自動設(shè)置高電平,以示發(fā)送或接收完畢,并且采用SPI接口與MCU通信,因此編程非常方便。它可廣泛應(yīng)用于車輛監(jiān)控、遙控、遙測、工業(yè)數(shù)據(jù)采集、水文氣象監(jiān)控、非接觸RF智能卡、機器人控制、數(shù)字音頻和數(shù)字圖像無線傳輸?shù)阮I(lǐng)域。
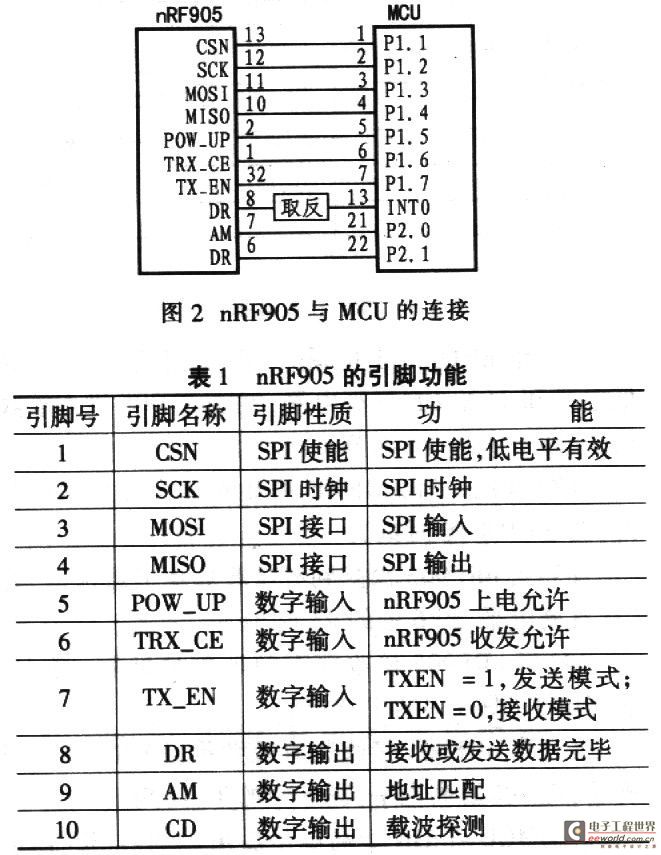
nRF905除了負責(zé)動感系統(tǒng)中動感數(shù)據(jù)的無線傳輸外,還可傳輸新型車輛模擬駕駛訓(xùn)練系統(tǒng)中模擬駕駛室向模型車發(fā)送的油門、燈光、制動、轉(zhuǎn)向、分動箱、離合等控制指令。nRF905與MCU的連接如圖2所示,引腳功能說明見表1。
3.3 動感平臺及其控制系統(tǒng)
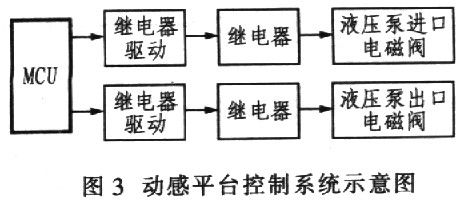
動感平臺是動感系統(tǒng)的執(zhí)行部分,它由6個液壓泵和模擬駕駛室的底板構(gòu)成。其工作原理是MCU根據(jù)傳來的動感數(shù)據(jù)通過繼電器驅(qū)動電路控制相應(yīng)繼電器,使相應(yīng)液壓泵的相應(yīng)電磁閥開啟或閉合,進而模擬駕駛室上下顛簸、前后俯仰或左右搖擺,如圖3所示。
4 軟件設(shè)計
由于HMR3000和nRF905分別通過RS-232接口和SPI接口與MCU進行通信,故整個系統(tǒng)的硬件電路相對比較簡單,但是,由于HMR3000采用NMEA0183協(xié)議格式輸出數(shù)據(jù),nRF905收發(fā)數(shù)據(jù)又有嚴格的時序要求,因而軟件設(shè)計相對比較復(fù)雜。

評論