基于ARM+FPGA的可重構MAC協議的設計與實現

基于CSMA/CA的MAC協議的優勢在于其簡單和健壯性,適用于分布式網絡,每個節點無需維持和動態更新周圍相鄰節點的狀態信息,可以獨自決定何時接入信道,只要上層有數據需要傳輸,MAC層就會對信道進行競爭,因此該協議的應用也相當廣泛。嵌入式技術的發展對MAC協議的實現也提供了很好的技術支撐。本文搭建了一種基于ARM和FPGA相結合的嵌入式開發平臺,并在此基礎上設計與實現了基于CSMA/CA的MAC協議。由于ARM和FPGA本身就是可重構器件,同時將FPGA中的一些協議參數由ARM來設置,通過修改ARM的代碼就可以實現對FPGA中協議功能的調整,方便快捷,不再需要重新生成比特文件下載,有利于MAC協議可重構的實現。
1 協議功能描述
1.1 報文結構
本設計實現的是基于CSMA/CA的MAC協議的基本訪問模式,節點之間的通信只有數據幀(DATA)和應答確認幀(ACK)。圖1給出了報文結構,其中ACK沒有凈數據部分。由于考慮的是一跳范圍的無線通信,沒有中繼節點等,因此只有源節點號和目的節點號。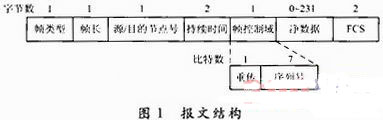
1.2 組網設計
本文設計的MAC協議除了滿足基本的的物理載波偵聽和虛擬載波偵聽相結合檢測信道忙閑的機制外,還包括幀間間隔、隨機退避、應答確認和重傳機制。
有數據要發送的節點會首先監聽媒介,若為忙則繼續等待,若空閑的時間超過或者等于DIFS或者EIFS則會進入退避進程。在執行退避進程過程中,節點將隨機產生一個退避時間來設置退避定時器,同時繼續監聽媒介,若空閑時間達到了一個時隙時間,則退避定時器減去一個時隙時間,如果在期間媒介變為了忙,退避進程將掛起,直到媒介空閑時間再次達到DIFS或者EIFS后才會接著繼續進行退避進程。當退避定時器變為0時,節點才允許開始發送數據,同時也會啟動超時重傳機制,如果在規定的時間內沒有收到所希望的ACK,則會重傳數據幀,當節點重傳的次數超過了重傳門限將會丟棄該數據幀,或者超過了數據幀最長允許的發送時間,也會丟棄該數據幀;當節點收到ACK時,就會開始準備下一次數據的發送。
接收節點收到正確且是發送給本節點的數據幀將會立刻回復源節點ACK。如果節點沒有收到正確的數據幀,則將使用EIFS;如果收到正確的數據幀,但是不是給本節點的,節點將解析出持續時間,更新NAV,將信道視為已被占用。
1.3 功能劃分
本設計充分利用ARM靈活便捷的優勢,用來實現隨機退避算法和協議參數的管理,如重傳次數,幀間間隔的設置等。隨機退避算法采用的是第i次退避就在2i個時隙中隨機地選出一個值作為節點需要退避的值。協議參數的設置由ARM來完成,主要是考慮到FPGA不利于參數的修改,這樣也可以增強協議的可重構性。而FPGA以其卓越的實時信號處理優點,用于管理MAC幀的收發控制等。
2 協議設計
MAC層的工作狀態主要是由物理載波偵聽和虛擬載波偵聽共同決定的(即:MAC_flag=CS_flag or NAV_flag),當兩者都顯示為空閑時,MAC層才會進入發送數據幀狀態。同時該協議也需要時鐘計數參與其中,IFS_time是每個節點在進入退避進程前需要等待的時間,實現幀間間隔的功能;Backoff_time是每個節點在退避進程中退避的時間;NAV_time是沒有在通信的節點預留信道的時間。這三個時間也關系著整個協議所處的狀態。圖2給出了具體的實現流程圖,具體實現過程步驟如下: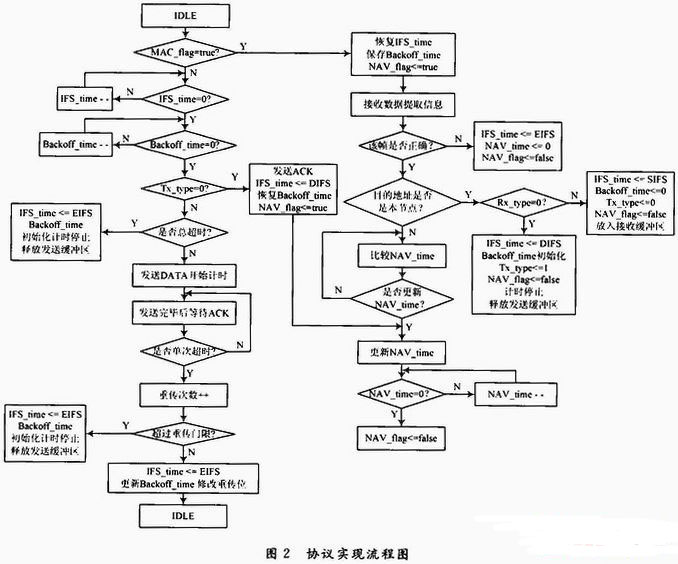
(1)若MAC_flag為false時,表明信道空閑,此時進入(2);若MAC_flag為true,則說明現在信道已被占用,此時不管節點已經處于什么狀態都會進入第七步,除了正在發送數據的節點,由于正在發送的節點是不可能監聽信道的,而且也無法接收其他節點的數據,載波偵聽機制在這種狀態下是失效的,因此不會出現正在發送數據的節點從發送狀態突然變為接收狀態。
(2)執行幀間間隔進程,遞減IFS_time大小,直到為0就進入(3)。IFS_time的初始值為DIFS。
(3)退避進程。退避時間的大小主要是由ARM提供,當節點經歷了一個時隙時間,退避時隙數減1,但當節點沒有完全經歷一個時隙時間,退避時隙數就不會變化。退避進程結束后就會進入(4)。
(4)判斷發送類型,設計中發送類型Tx_tpye的初始值為1。若Tx_tpye為0,則為節點發送ACK,根據接收到的數據幀中的源/目的節點號以及序列號等組裝回復發送節點ACK,并初始化IFS_time和Backoff_time以備節點發送數據幀使用,同時設置NAV_flag為true,更新NAV_time的值,繼續虛擬載波偵聽,避免出現發送ACK的節點會優先占用信道的情況;若Tx_tpye不為0,則表明節點可以開始發送數據幀,轉入(5)。
(5)發送數據幀前首先判斷是否超過最大允許發送的時間,若超過了就丟棄該數據幀,將IFS_time設置為EIFS,Backof_time初始化,超時計時器停止;若沒有超過最大允許發送時間,則節點正式發送數據幀,并啟動單次超時計時,發送完畢后就等待ACK,此時進入(6)。
(6)在等待ACK到來的同時判斷是否超時單次允許發送的時間,若超過了,則重傳次數遞加;然后判斷是否超過重傳門限,如果超過了門限,則丟棄該數據幀;如果沒有超過,則將IFS_time設置為EIFS,而且還需要ARM的隨機退避算法根據重傳次數重新給一個退避時隙數,同時修改數據幀中的重傳位以便接收節點識別。
(7)保存當前退避進程中的Backoff_time和剛剛結束的幀間間隔的大小IFS_time,接收MAC幀并解析其中相關的數據,為后續的組裝ACK做準備,然后進入(8),同時將NAV_flag設置為true,保證MAC層能處理完數據。
(8)校驗接收到的MAC幀是否正確,若不正確,則將IFS_time設置為EIFS,NAV_flag設置為false,NAV_time設置為0,這樣節點就進入執行幀間間隔進程。若校驗正確,則進入(9)。
(9)將FPGA解析出來的目的節點號與本節點的比較,判斷是否是發送給本節點的。如果不是發送給本節點的,那么就再比較本節點現在的NAV_time值是否大于接收到的MAC幀內的NAV,若大于則本節點繼續按照現有的NAV_time值執行下去;若小于接收到的MAC幀內的NAV,則使用MAC幀內的NAV來更新本節點的NAV_time值,然后以最新的NAV_time值遞減下去直到為0,虛擬載波偵聽顯示空閑。但是在執行NAV_time遞減過程中隨時都有可能收到新MAC幀,而且也不是發送給本節點的,照樣要執行本步驟,并不是等到NAV_time變為0后再更新。如果是發送給本節點的,則會進入(10)。
(10)若節點接收到的是數據幀。即Rx_type為1,FPGA將接收到的數據幀上傳ARM;同時將IFS_time更新為SIFS,Backoff_time設置為0,這樣使得接收到數據幀到發送ACK之間的時間間隔為SIFS,并將Tx_tpye設置為0,NAV_flag變為false,進入(2),開始準備發送ACK。如果Rx_type為0,則節點接收到的是ACK,說明一次數據收發過程結束,節點將初始化相關參數,計時停止等,FPGA釋放空間,表明該數據幀已發送成功。
3 仿真驗證
基于CSMA/CA的MAC協議的實現關鍵在于各個節點對各種情況的處理,因此對一個節點協議功能的仿真驗證也能說明設計的正確性。本設計中FPGA部分的設計是重點,所以使用ModelSim進行仿真觀察節點FPGA的處理過程。
3.1 信道競爭過程
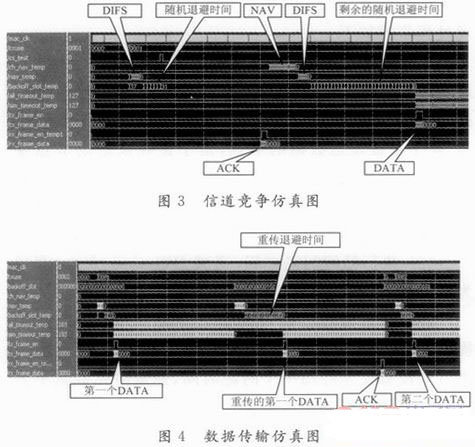
基于CSMA/CA的MAC協議中各個節點也不知道自身周圍的節點情況,因此節點競爭信道時隨時都可能檢測到信道已被占用。圖3給出了節點在退避過程中檢測到物理載波偵聽變為忙,立刻停止退避進程,將此時的退避時隙數掛起,即退避時隙數保留為31。待到信道重新空閑超過幀間間隔DIFS后,將以保留的退避時隙數繼續進行退避進程,變為0后開始發送數據幀。在圖中還可以看到節點收到正確的ACK后,更新NAV的過程。從仿真圖的執行流程可以說明所設計的MAC協議滿足載波偵聽機制、幀間間隔、隨機退避的功能要求。
3.2 數據傳輸過程
從圖4中可以觀察到節點發送第一個數據幀后,超時計數器開始計時,但在規定時間內沒有收到ACK,則重傳數據幀,重傳退避的時間是重新賦值的,并且幀間間隔不再是DIFS,而是EIFS;當節點接收到正確的ACK后,開始發送新的數據幀。說明了所設計的MAC協議能夠實現確認重傳機制。
4 結語
在以ARM和FPGA為主的硬件結構上,設計與實現了基于CSMA/CA的MAC協議,該協議具有載波偵聽機制、隨機退避、確認重傳等功能。經過仿真測試,驗證了所設計MAC協議的可行性。

評論